 How to resolve AdBlock issue?
How to resolve AdBlock issue? Jeti MGPS - Einsatz und Analyse in Flächenmodellen
Autor und Abbildungen: Peter Kaminski
Dank der Miniaturisierung von GPS-Chipsätzen kommen auch wir Modellbauer in den Genuss dieser Technik. So bietet auch Jeti seit kurzem mit dem MGPS einen GPS-basierenden Sensor für sein Duplex-System an, welches mit Software-Unterstützung nähere Aufschlüsse über Flugeigenschaften und Flugraumnutzung gestattet.
Global Positioning System (GPS)
Das GPS wurde bereits in den 70er Jahren vom US-Verteidigungsministerium entwickelt und ist seit über 15 Jahren im Einsatz. Für die zivile Nutzung wurde die Auflösungsgenauigkeit bewusst verschlechtert . Dies wurde ab Mai 2000 aufgehoben, so dass die Auflösung des Standard Positioning Systems (Abk.: SPS) in der Horizontalen mit der aktuellen Satellitengeneration bei ca. acht Metern bei 95 Prozent der Messungen in der Horizontalen liegt. Dieser Wert wird aber in der Praxis noch unterschritten und ist auch Abhängig vom GPS-Empfänger und der Anzahl der empfangenen Satelliten. In der Praxis haben die Hälfte der Messpunkte eine Genauigkeit von besser als vier Metern. Für die Luftfahrt und Seefahrt ist diese Genauigkeit jedoch z. T. zu klein und so wird durch das Differential GPS (Abk. DGPS) mit einer Referenzstation die Auflösung bis in den Zentimeterbereich hin erhöht. Für die Zwecke und Ansprüche in dem Segment der Modellflug-Flächenmodelle reicht SPS aber natürlich völlig aus.
Die Satelliten senden ständig ihre Position und versehen diese mit einem präzisen Zeitstempel. Über die Laufzeitunterschiede der empfangenen Satellitensignale lässt sich der eigene Standort dreidimensional (also Breiten- und Längengrad sowie Höhe) bestimmen. Für eine Positionsbestimmung sind theoretisch mindestens vier Satellitensignale erforderlich. Man hat aber viele Ersatzsatelliten im Einsatz, so dass am Boden immer mindestens fünf Satelliten empfangen werden können. In der Regel sind es noch deutlich mehr. Gesendet werden die Signale für die zivile Nutzung, der sogenannte C/A-Code, auf 1.575,42 MHz (L1-Frequenz). Aber auch hier wird der verschlüsselte Code für den militärischen Einsatz, der sogenannte P/Y-Code, mit übertragen. Auf der zweite Frequenz 1.227,60 MHz (mit L2 bezeichnet) wird der militärische P/Y-Code übertragen und optional auch der C/A-Code (dann L2C genannt). Die Satelliten die ab 2010 ins All gebracht wurden senden mit 1.176,45 MHz noch auf einer dritte Frequenz (mit L5 bezeichnet). Es kommt hier eine andere Abstrahlcharakteristik zum Einsatz, um für die Luftfahrt in großen Höhen stabilere Empfangsbedingungen zu schaffen. Empfänger für die Zivile-Nutzung verfügen ausschließlich über Empfänger für die L1-Frequenz.
Höhenmessung
Um die Eignung für bestimmte Einsatzgebiete besser einschätzen zu können, möchten wir hier einmal zunächst auf die Messung der Höhe eingehen. Eine einfache Messung ist mit einem Luftdrucksensor realisierbar. Der Luftdruck nimmt mit der Höhe proportional zu und so lässt sich dann die Höhe ermitteln. Da wir uns mit unseren Modellen in nur relativ kleinen Räume und auch relativ kleinen Zeitabschnitten bewegen, ist der Luftdruck relativ konstant und die Messungen sind, natürlich in Abhängigkeit vom Sensor, auch genügend genau sind.
Beim GPS ist es so, dass die Genauigkeit, bzw. die Auflösung in der Horizontalen (Position) und in der Vertikalen (Höhe) nicht identisch sind. Die Genauigkeit bei der Höhenbestimmung ist schlechter als die der Positionsbestimmung. Bei genügend Satelliten ist die relative Höhe aber auch genügend genau.
Weiter muss man beachten, dass die Erde nicht rund ist und daher die absolute Höhe gegenüber der via GPS ermittelten differieren kann. Zur Erhöhung der Genauigkeit der absoluten Höhe wird in Hand-Held-Geräten oft ein ortsabhängiger Korrekturfaktor über eine interne Datenbank eingerechnet. Für unsere Zwecke reichen aber in der Regel die Angaben der relativen Höhe aus, denn in dem kleinen Gebiet in dem wir fliegen, kann man die Erde in der Praxis als genügend Rund annehmen.
Man muss also immer bedenken, dass die Höhenauflösung zwar etwas abweichen kann, die Werte für uns aber in der Praxis genügend genau sind, da wir durch die Höhe beim Fliegen in der Regel eine optimale Empfangssituation für GPS schaffen. Wer aber eine exakte absolute Höhenangabe im Meterbereich fordert, der ist mit einem guten Drucksensor besser bedient, wie dem Jeti MV Vario, der ja auch parallel mit dem Jeti MGPS betrieben werden kann.
Geschwindigkeitsmessung
Für die Geschwindigkeitsmessung gibt es verschiedenste Möglichkeiten. Früher kam oft eine akustische Messung mit Hilfe des Dopplereffektes zum Einsatz. Die Frequenzverschiebung des wahrgenommenen, bzw. aufgezeichneten Motorgeräusches beim Überflug über die Zeit lässt mit einer Software die Errechnung der Geschwindigkeit zu. Bei modernen Impellern ist es so, dass der tonale Anteil des Antriebsgeräusches häufig geringer ausfällt und die Frequenzanalyse daher schwierig ist. Allgemein sind die Messungen mit dieser Methode aber nach heutigen Maßstäben nicht sehr zuverlässig.
Eine weitere Methode, die von vielen als sehr genau eingeschätzt wird ist die Messung über Radar mittels Dopplereffekt. Die Radarpistole muss aber exakt im Null-Grad-Winkel auf das sich bewegende Objekt ausgerichtet sein. Man muss also die Radarmesspistole überfliegen. Man kann auch einen Korrekturfaktor bei schrägem Anflug berechnen aber wer kennt schon den exakten Winkel zum Radarstrahl. Die Methode wird daher in Ihrer Genauigkeit häufig überschätzt. Bei 20 Grad Abweichung beträgt der Geschwindigkeitsfehler sechs Prozent, bei 30 Grad schon 13 Prozent.
Bei der Messung über GPS wird die Geschwindigkeit über die Strecke errechnet, die zwischen zwei Messpunkten ermittelt wird. Hier ergeben sich zwei Ungenauigkeiten. Durch die etwas schlechtere Auflösung der Höhe bei GPS wird bei Steig- und Sinkflügel oder bei Figuren wie Loppings, die Geschwindigkeit nicht so präzise ermittelt. Wenn die Messabstände zu groß gewählt werden ist die geflogene Strecke in Kurven länger als die Gerade zwischen den beiden Positionen und hier ergibt sich ebenfalls ein weiterer Messfehler. Bei den im Modellflug auftretenden Geschwindigkeiten und einem Messabstand von einer Sekunde ist die Geschwindigkeitsmessung genügend genau und genauer als mit einer Radarpistole.

Eine Alternative ist die Messung über ein Staurohr wobei Staudruck und der Umgebungsluftdruck gemessen wird. Da der Staudruck dem Quadrat der Strömungsgeschwindigkeit proportional ist, lässt sich hier relativ genau die Geschwindigkeit ermitteln - einen genauen Drucksensor vorausgesetzt. Der Vorteil ist, das hier nicht die Geschwindigkeit über Grund, wie bei allen anderen Messverfahren, ermittelt wird, sondern die wahre Fluggeschwindigkeit. Der Vorteil beim Jeti-System ist, dass neben dem MGPS-Sensor auch noch der MSPEED Staurohr-Sensor parallel betrieben werden kann. So lässt sich zumindest die maximale Fluggeschwindigkeit über Grund mit GPS und die Fluggeschwindigkeit mit dem Staurohr vergleichen. Wer nicht nur die Geschwindigkeitsdaten via GPS sondern auch die wahre Fluggeschwindigkeit loggen möchte, der kann z. B. auf das UniLog-System von SM-Modellbau zurückgreifen. Der Uni-Log lässt sich auch mit dem Jeti-Sensoren gemischt betreiben. Dies setzt natürlich ein Jeti E4 Expander voraus.
Jeti MGPS-Sensor
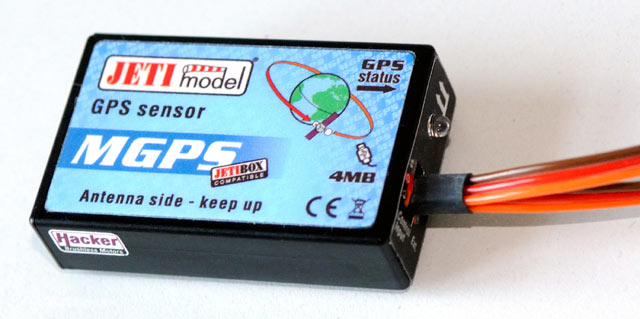
Der Jeti MGPS Sensor ist mit 50 x 30 x 13 mm so klein, dass er auch für den Betrieb in mittelgroßen Flugmodellen problemlos Platz finden sollte. Die 24 Gramm Gewicht gestatten auch den Einbau in jeden gewichtskritischen Elektroflieger.
In unserem Test verwendeten wir ein MGPS-Modul mit der Firmware 1.06. Das schwarze Kästchen ist mit einer Indikator-LED ausgestattet, die langsam blinkt, wenn keine Verbindung zu den Satelliten besteht. Bei Empfang zeigt die LED über Blinken die Anzahl der empfangenen Satelliten an. Aus dem Jeti MGPS kommen zwei Servokabel und zwar eines für den Anschluss an den Empfänger oder der Sensor-Extension und ein zweites für die Aufzeichnung eines Servokanals, in der Regel wohl die Gasstellung. Bei ersten Mal dauert der es etwas über eine Minute, bis der Sensor den Satellitenempfang über das Blinken bestätigt. Wenn man den Empfänger das zweite Mal Einschaltet, wird die letzte Position gespeichert und schon nach wenigen Sekunden ist der MGPS startklar. Der interne Speicher kann bis zu 32.768 Positionen, bzw. 1.024 Tracks speichern. Das sind bei einer Sekunde Speicherzyklus neun Stunden Aufzeichnungsdauer.
Damit eine Aufzeichnung der Track-Daten beim MGPS startet müssen mindestens fünf Satelliten empfangen werden. Die Aufzeichnung der Daten erfolgt wenn die Geschwindigkeit größer als 10 km/h ist. Durch den Geschwindigkeitsschwellwert wird erreicht, dass bei keiner Bewegung auch keine Positonsdaten abgelegt werden und so unnötigerweise Speicher belegen.
Die Anzahl der empfangenen Satelliten nimmt mit der Betriebszeit bei entsprechender Radiosicht zu. Bei unseren Tests wurden nach viereinhalb Minuten in der Regel zehn Satelliten empfangen. Die Empfindlichkeit des GPS-Empfängers kann man als sehr gut bezeichnen. Man muss ihn aber schon an einer Stelle positionieren wo nach oben und auch möglichst zur Seite, kein Metall oder andere elektrisch leitende Materialien, wie z. B. eben auch CFK, die Satellitensignale abschirmen. In oder unter der Cockpithaube ist in der Regel eine optimale Position.
Besonders erwähnenswert ist übrigens, dass auch eine autarke Nutzung, also ohne Anbindung an einen Jeti-Empfänger, möglich ist. Wenn der Sensor mit Strom versorgt wird, genügend Satelitten empfängt und die 10 km/h Mindestgeschwindigkeit erreicht wird, erfolgt automatisch die Track-Aufzeichnung.
Analyse mit Jeti Box
Eine Analyse nach dem Flug, bzw. in Echtzeit, ist über die am Sender angeschlossene Jeti Box möglich. Nach Anwahl des Sensors in der Jeti Box wird ein Start-Display mit mehreren möglichen Display-Konfigurationen angezeigt, die in Echtzeit gleichzeitig drei der folgenden Parameter ausgeben: Höhe, Geschwindigkeit, Entfernung und zurückgelegte Strecke - vorausgesetzt der GPS-Empfänger empfängt genügend Satelliten. Über den Menüpunkt ACTUAL VALUE lassen sich auch noch weitere Parameter ausgeben.
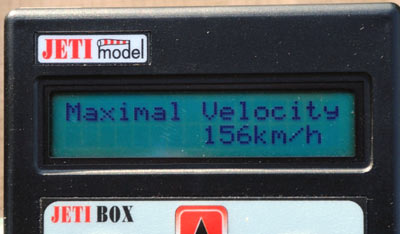
Weiter sind im Menü MIN/MAX minimale und maximale Höhe, maximale Entfernung, maximale Geschwindigkeit und die zurückgelegte Strecke abrufbar. Über das Menü GPS DATA lassen sich aktueller Breiten- und Längengrad, sowie Höhe und Zeitstempel ausgegeben.
In dem Menü SETTING lassen sich minimal und maximal Werte oder auch der komplette Speicherinhalt löschen. Weiter kann der Anwender u. a. noch die Aufzeichnungsrate und auch die Lokalzeit einstellen. Die Minimale Aufzeichnungsrate beträgt übrigens 0,2 Sekunden. Ab Werk ist eine Sekunde voreingestellt, was auch die gängigsten Geschwindigkeitsbereiche abdeckt.
Sehr interessant ist, dass auch bei dem MGPS-Sensor Alarme einstellbar sind. So lassen sich für Höhe, Distanz und Geschwindigkeit Schwellwerte für einen Alarm definieren. Für jeden Alarmtyp lässt sich individuell ein Morsebuchstabe über das SETTING-Menü zuordnen.
Tracking-Datei
Über das Programm GetGPS1.EXE von Jeti, welches man von der Hersteller-Seite kostenfrei herunterladen kann, lassen sich in Zusammenhang mit dem Interface USBa die in dem MGPS gespeicherten Tracks auslesen, als Trackdatei speichern und auf Wunsch auch aus dem internen MGPS-Speicher löschen. Es ist zunächst nötig einen Treiber zu installieren, was problemfrei von statten ging. Nachdem Anstecken des Interface muss man, auch wenn der Rechner das USB-Interface schon erkannt hat, zunächst warten bis die grüne LED leuchtet und dann ruft man die Software auf, die ggf. vorhandene Track-Logs auf die Dateiebene schreibt, wo sich das GetGPS1-Programm befindet.
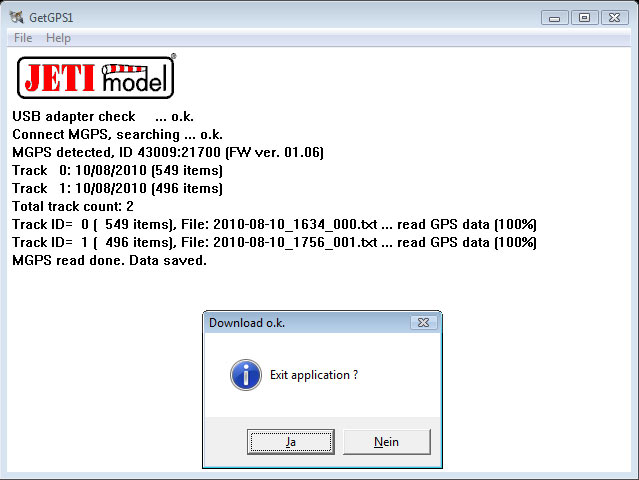
Über das Programm GetGPS1.EXE von Jeti lassen sich die in dem MGPS gespeicherten Tracks auslesen, als Track-Datei speichern und auf Wunsch auch aus dem internen MGPS-Speicher löschen.
Das Programm zum Auslesen der MGPS-Daten kann von der Hersteller-Seite www.jetimodel.cz kostenfrei herunterladen werden. Am besten legen Sie das Programm auf dem Desktop des PCs ab, denn der Zielort der Dateien ist gleich dem Ort an dem sich das Programm befindet. Die Daten werden als ASCII-Textdateien im NMEA-Format 2.0 (NMEA steht für National Marine Electronics Association) abgelegt und lassen sich daher mit einem Texteditor öffnen und lesen. Zur weiteren Verarbeitung ist es wichtig, dass sie die Dateiendung von .TXT in .NMA ändern, da sie sonst das Programm häufig nicht mit den GPS-Analyseprogrammen öffnen können.
NMEA 2.0
So sieht das Datenformat in dem die Positionsmeldungen gespeichert werden in einem Texteditor aus.
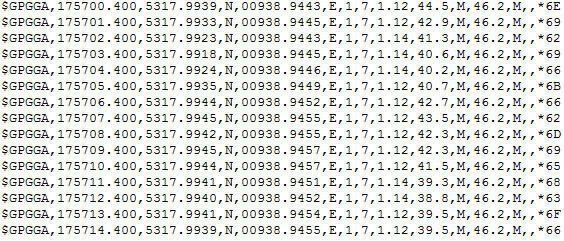
Für jede Positionsmeldung ist beim NMEA 2.0-Format eine Zeile vorgesehen. Diese beginnt mit $GP für Global Positioning. Danach folgt das Unterformat, hier GGA für „Fixed Data 3 D Location“, gefolgt von einzelnen Parametern, die mit einem Komma getrennt sind. Unterteilungen der Parameter sind mit einem Punkt getrennt. Es folgt nach dem $GPGGA die Uhrzeit und zwar als Weltzeit (UTC) also minus eine (Mitteleuropäische Zeit) oder zwei Stunden (Mitteleuropäische Sommerzeit), dann der Breitengrad und die Angabe der Halbkugel Nord oder Süd (z. B. 5317.9948,N) und der Längengrad mit der Angabe Ost oder West (z. B. 00938.9452,E), dann der Auflösungstyp (1 für GPS fixed), die Anzahl der empfangenen Satelliten, dann ein Wert der die HDOP angibt (Abk. für Horizontal Dilution of Precision), also die relative Genauigkeit der horizontalen Position, dann folgt der Wert der Höhe über Meereshöhe und die Maßeinheit (z. B. 37.4,M für 37,4 Meter) und noch der Wert der Höhe und Maßeinheit bezogen auf den sogenannten WGS84-Ellipsoid. Nach einem oder zwei Leerfeldern (werden nur für DGPS genutzt) wird dann noch eine zweistellige Check-Summe, der ein * vorangestellt ist, zur Überprüfung dieser Positionsmeldung, abgelegt.
Software-Analyse
Es gibt eine ganze Reihe von Möglichkeiten der Analyse entweder über Software oder online über Web-Anwendungen. Besonders empfehlenswert ist die kostenlose Software GPS-Track-Analyse.NET, welche viele Funktionen vereint. Die in .NMA umbenannten Track-Dateien lassen sich mit der Software direkt laden und die Ergebnisse aufbereitet darstellen. Diese Software und weitere Informationen über GPS und Analyse- und Konvertierungs-Software findet man auf folgendem Web-Auftritt: www.gps-freeware.de
GPS-Track-Analyse.NET
Die Software muss mit Administrationsrechten ausgestattet sein. Dazu muss man z. B. unter Windows Vista die .EXE im installierten Programmordner anwählen und die Dialogbox „Eigenschaften“ über die rechte Maustaste aufrufen und dann die Checkbox „Programm als ein Administrator ausführen“ anwählen und mit „OK“ bestätigen.
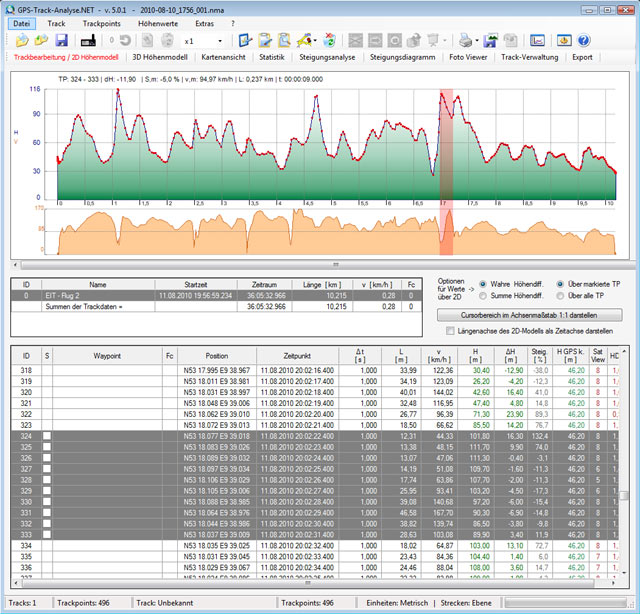
Nach dem Starten des Programm wird über „Datei öffnen“ die zu analysierende Datei geladen und in der Darstellung „Trackbearbeitung / 2D Höhenmodell“ sieht man oben den Höhenverlauf und darunter standardmäßig die Geschwindigkeit als Grafik dargestellt. Die einzelnen Messwerte sind unten alpha-numerisch gelistet. Wenn man in der Grafik oben einen Doppelklick an einer bestimmten Position ausführt, dann wird die Liste entsprechend dort hin verschoben. Wenn man in der Liste mit der Maus mehrere Einträge selektiert, wird dieser Bereich auch oben in der Grafik markiert.
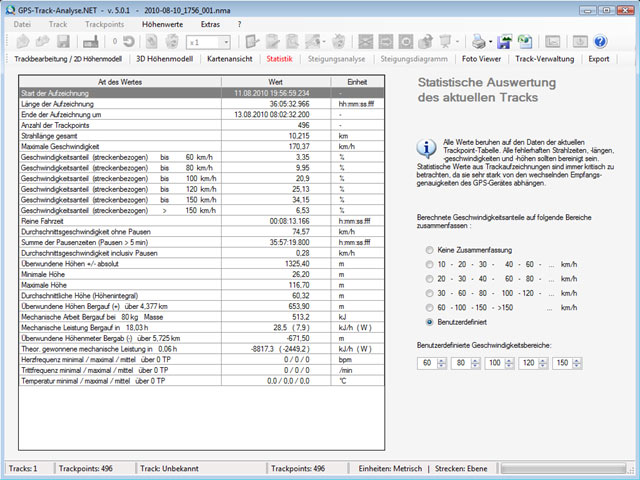
Mit der Statistikübersicht bekommt man schnell eine Auswertung über die wichtigsten Parameter, wie minimal und maximal Höhe, Maximalgeschwindigkeit etc. und auch, der prozentuelle Anteil von Geschwindigkeitsbereiche, die der Anwender auch selber spezifizieren kann.
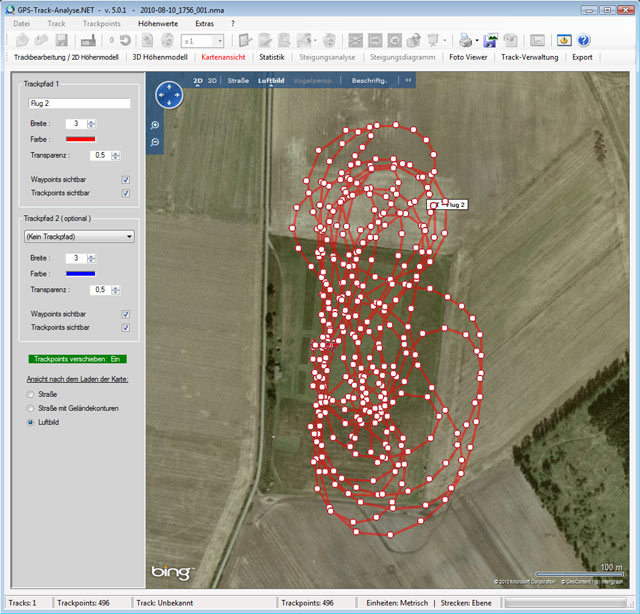
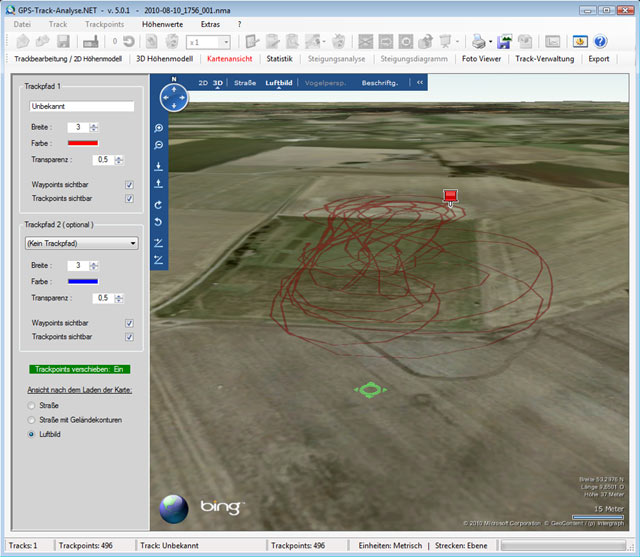
Für die Projizierung des Flugs auf eine Landkarte oder ein Satellitenbild oder beides, muss man auf seinem Rechner Bing Maps 3D installiert haben. Die Projizierung kann in 2D oder 3D erfolgen. Wenn man bei der 2D-Darstellung auf einen Track-Punkt mit der Maus zeigt, dann werden in einer Sprechblase die Daten zu dem Track-Punkt angezeigt.
Bei der 3D-Darstellung kann man die Betrachtungsposition über die Taste „Strg“ und die Maus beliebig einstellen.
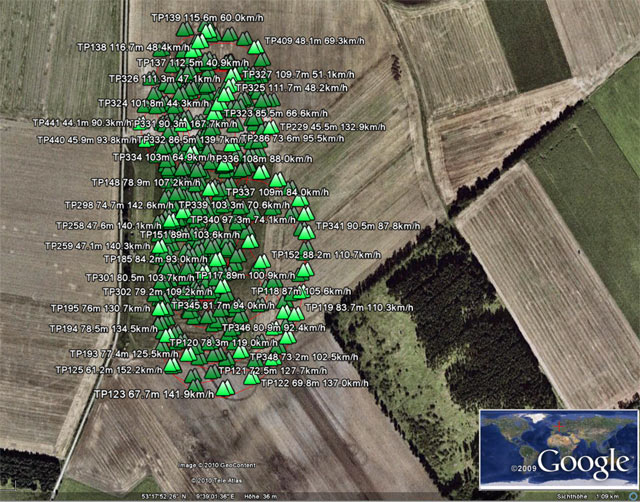
Mit der Software lassen über den Reiter „Export“ in der Software, über einen Dialog die Daten auch einfach an Google Earth übergeben, vorausgesetzt Google Earth ist auf dem verwendeten rechner installiert. Man muss dazu einmal den Speicherort von Google Earth in der Dialogbox angeben und entsprechende Zusatzoptionen, wie „relativeToGround“ anwählen und die Trackpoint-Parameter die angezeigt werden sollen definieren.
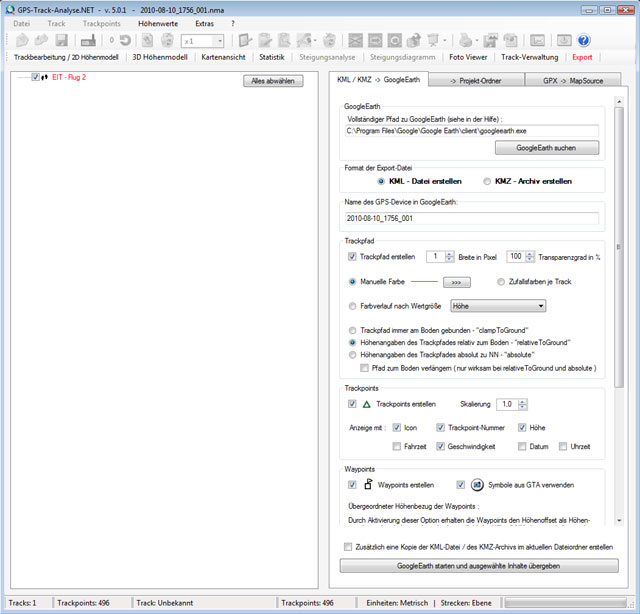
Durch Anwählen des virtuellen Tasters „GoogleEarth starten und ausgewählte Inhalte übergeben“ wird GoogleEarth aufgerufen und der Bereich mit den Trackdaten visuialisiert. Die Trackpoints lassen sich auch auf Wunsch ohne Icons darstellen, bzw. über die Trackpoint-Optionen im Export-Dialog ganz unterdrücken.
Viel einfacher als mit der Software GPS-Track-Analyse.NET lässt sich eine Analyse der GPS-Daten sicherlich nicht realisieren.
Fazit
Der MGPS ist für verschiedenste Anwendungen geeignet und zwar von der Erfassung von Flughöhe und Geschwindigkeit und andere Performance-Parameter bis hin zur Dokumentation der Flugroute und damit z. B. auch geeignet für den Nachweis der Einhaltung von Flugräumen. Bei unseren Tests wird das MGPS besonders bei den ersten Flügen eines Modells genutzt, um neben der Höchstgeschwindigkeit auch die Abhebe- und Landegeschwindigkeiten zu messen, was sehr hilfreich ist.
Preis beträgt ca. 110 Euro für die MGPS-Version mit 4 MB Speicher. Dazu benötigt man ggf. noch eine Jeti E4 Sensor-Extension für 35 Euro und für das Auslesen der Tracking-Daten ein Jeti USBa USB-Adapter für 15 Euro. Da sich der GPS-Sender ja für verschiedene Modelle genutzt werden kann, ist diese Investition von der Kostenseite doch sehr überschaubar und das Preis/Leistungsverhältnis kann man sicherlich ohne Bedenken als sehr gut bezeichnen.
www.hacker-motor.com
www.jetimodell.cz